Epson C4-B901S 爱普生C4紧凑型6轴机器人
- 功能亮点
- 规格参数
立即购买
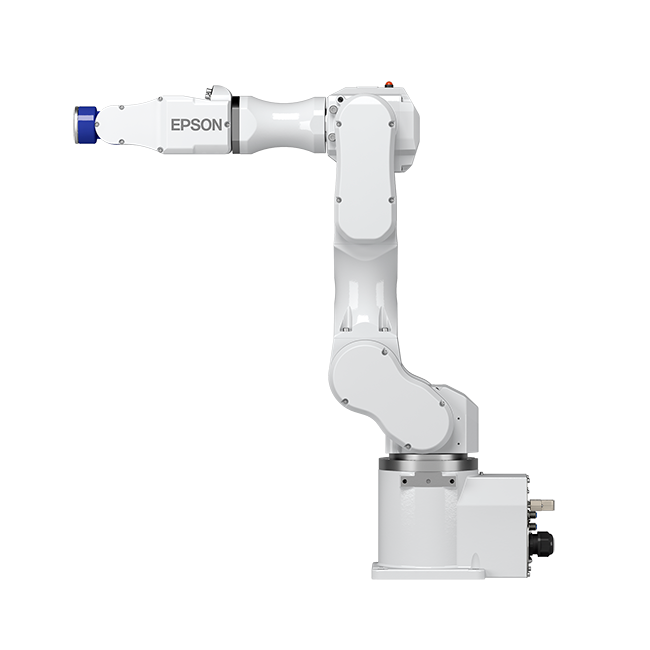


Epson C4-B901S
建议零售价:暂无定价
- 最大负载4kg
- RC700-E 控制器内置安全板卡,拓展安全功能
- 免电池马达单元,易于维护
- 高速度、高重复定位精度,最大化生产率
- 设计紧凑,配置灵活
爱普生C4紧凑型6轴机器人专为最大灵活性、运动范围和速度而制造。在机器人设计和性能方面,包含所有最新技术。C4紧凑型6轴机器人与我们的功率驱动伺服技术相结合,能产生客户所期待的高性能效果。同时匹配新的RC700-E控制器,和RC+软件平台,为您提供更高效的应用。
高性能
- 业界领先的循环时间
- 在保持最快循环时间的同时,负载高达4千克
- 较高的重复定位精度,符合客户期许
- 纤细线性机体设计和超紧凑手腕提供最大的灵活性
- 较大的运动范围,能达到其他小机器人无法够到的区域
功能强大的控制器与开发软件
- 爱普生新型控制器RC700-E提供更丰富和易用的接口
- 爱普生RC+软件提供更强大的开发功能,简单易用
- 集成选项可优化系统性能,减少总开发时间(更多信息,请参阅选项页)
- 高性能处理能力
完整集成选项
- 安全功能板卡
- 视觉引导
- 网络连接性
- 设备网、现场总线、以太网、IP、CC-Link现场总线连接
- 安全和审计
- GUI构建器
- 其它轴控件
- 传送带跟踪
- 提供洁净型/ESD 型号
适用于众多应用及行业
- 汽车
- 医疗
- 实验室自动化
- 消费电子产品
- 工业产品
- 通信
- 制药
- 半导体
- 电子设备
产品规格
| 产品型号 | C4-B901S | |
| 安装方式 | 台面安装/吊顶安装*4 | |
| 运动自由度 | 6 | |
| 最大运动范围 | P点:通过J4/J5/J6中心 | 600 mm |
| 手腕法兰面 | 965 mm | |
| 最大运动速度 | 第 1 关节 | 275°/s |
| 第 2 关节 | 275°/s | |
| 第 3 关节 | 289°/s | |
| 第 4 关节 | 555°/s | |
| 第 5 关节 | 555°/s | |
| 第 6 关节 | 720°/s | |
| 本体重量(不含线缆重) | 30 kg | |
| 重复定位精度 | 第1-第6关节 | ±0.03 mm |
| 最大运动范围 | 第 1 关节 | ±170° deg |
| 第 2 关节 | -160°~+65° | |
| 第 3 关节 | -51°~+225° | |
| 第 4 关节 | ±200° | |
| 第 5 关节 | ±135° | |
| 第 6 关节 | ±360° | |
| 负载*1 | 额定值 | 1 kg |
| 最大值 | 4 kg (轴臂向下定位 5KG) | |
| 标准循环时间*2 | 0.455 秒 | |
| 容许惯性力矩*3 | 第 4 关节 | 0.15 kg·m2 |
| 第 5 关节 | 0.15 kg·m2 | |
| 第 6 关节 | 0.1 kg·m2 | |
| 电机功耗*7 | 1.7 kVA | |
| 用户电路 | 9针(D-Sub 模拟接口) | |
| 用户气路 | ø4mm×4: 耐压0.59MPa(6 kgf/cm2] | |
| 安装环境 | 标准型/洁净*5+ESD(防静电)型*6 | |
| 适用控制器 | RC700-E | |
| 安全标准*8 | CE, UKCA, KC/KCs, NRTL | |
备注:
*1: 请勿超过最大负载使用。
*2: 循环时间基于额定负载加速模式下(水平300mm,垂直25mm),往返拱形运动的时间(最大速度最优行程坐标)。
*3: 根据负载和末端执行器的状态,通过Inertia命令来设置参数(参数计算方法使用说明书)。
*4:发货时,所有机型设置为“台面安装”。如果您想使用机械手作为吊顶安装,您必须配置机型设置。 关于如何设置机型的详细信息,请参见“爱普生RC+用户指南机器人设置”。
*5: 洁净度等级(ISO14644-1):ISO Class 3
*6: 防静电模型的主要树脂部件采用导电材料或应用板加工。对于机械手的尖端(工具安装部分),在标准下操作测量后电位差为±5v或更低。
*7: 实际功耗将受操作环境、操作程序等因素影响。
*8: 不同标准的适用时间有所不同。
控制器

爱普生控制器 RC700-E
- 爱普生 RC+ 具有行业领先的易使用性(新版本 7.0)
- 控制爱普生 GX 系列机器人
- 可以连接 PC 主站和 PLC 主站
- USB 连接;安装简单
- 支持OPC-UA
- 内置安全板卡,拓展安全功能
| 产品型号 | RC700-E | |
| 可控制轴的数量 | AC最大可接六(6)轴伺服电机 | |
| 机器人操纵器控制 | ||
| 编程语言机器人控制软件 | 爱普生RC+ | |
| 关节控制 | 同时最大六(6)关节软件AC伺服控制 | |
| 软件 AC 伺服控制 | ||
| 速度控制 | PTP 运动时:1~100% 可编程;CP 运动时:可自由设定速度 | |
| 加/减速度控制 | PTP 运动时:1~100% 可编程;自动控制;CP 运动时:可自由设定加/减速度 | |
| 定位控制 | ||
|
PTP(点到点) CP(连续轨迹) |
||
| 内存容量 | ||
|
最大对象大小:4MB 点数据区:1000 点/文件 备份变量区:最大 100KB(含管理表内存区) 约 1000 个变量(随数组变量大小而变化) |
||
| 外部输入/输出信号(标准) | ||
| 安全 I/O |
输入:5 输出:3 |
|
| 标准 I/O |
输入:24 输出:16 |
每驱动组 |
| R-I/O | 输入:2 | |
| 通信接口(标准) | ||
| 以太网 | 1 端口 | |
| RS-232C | 1 端口 | |
| 安全功能 | ||
|
低功耗模式/动态制动/过载检测/扭矩误差检测/速度误差检测/ 位置偏差溢出检测/ CPU错误检测/速度偏差溢出检测/过热检测/ 内存错误检测/风扇错误检测/继电器熔毁检测/过压检测/ 交流低电压检测/温度异常检测 |
||
| 电源 | ||
|
AC 200V至AC 240V 单相50/60Hz |
||
| 重量*1 | ||
| 12kg | ||
| 环境温度 | ||
| 安装 | 5~40℃ | |
| 运输、存储 | -20~60℃ | |
| 环境相对湿度 | ||
| 安装 | 20~80% | |
| 运输、存储 | 10~90% | |
| 防护等级 | ||
| IP20 | ||
| 安装方式 | ||
| 水平安装,垂直安装,机架安装,侧壁安装(可选) | ||
备注:
*1 控制器上标示了重量,搬运时请确认重量;检查重量,如有需要,增加人手。移动或重新定位时,请小心手指脚趾。










